O jogo de equilíbrio é um brinquedo científico interativo que desafia o jogador a manter uma esfera metálica no centro de uma plataforma inclinável. Usando um joystick analógico, o usuário controla um servomotor responsável por inclinar a rampa em dois eixos. O projeto une conceitos de física, eletrônica e programação, sendo ideal para aplicações didáticas com Arduino.
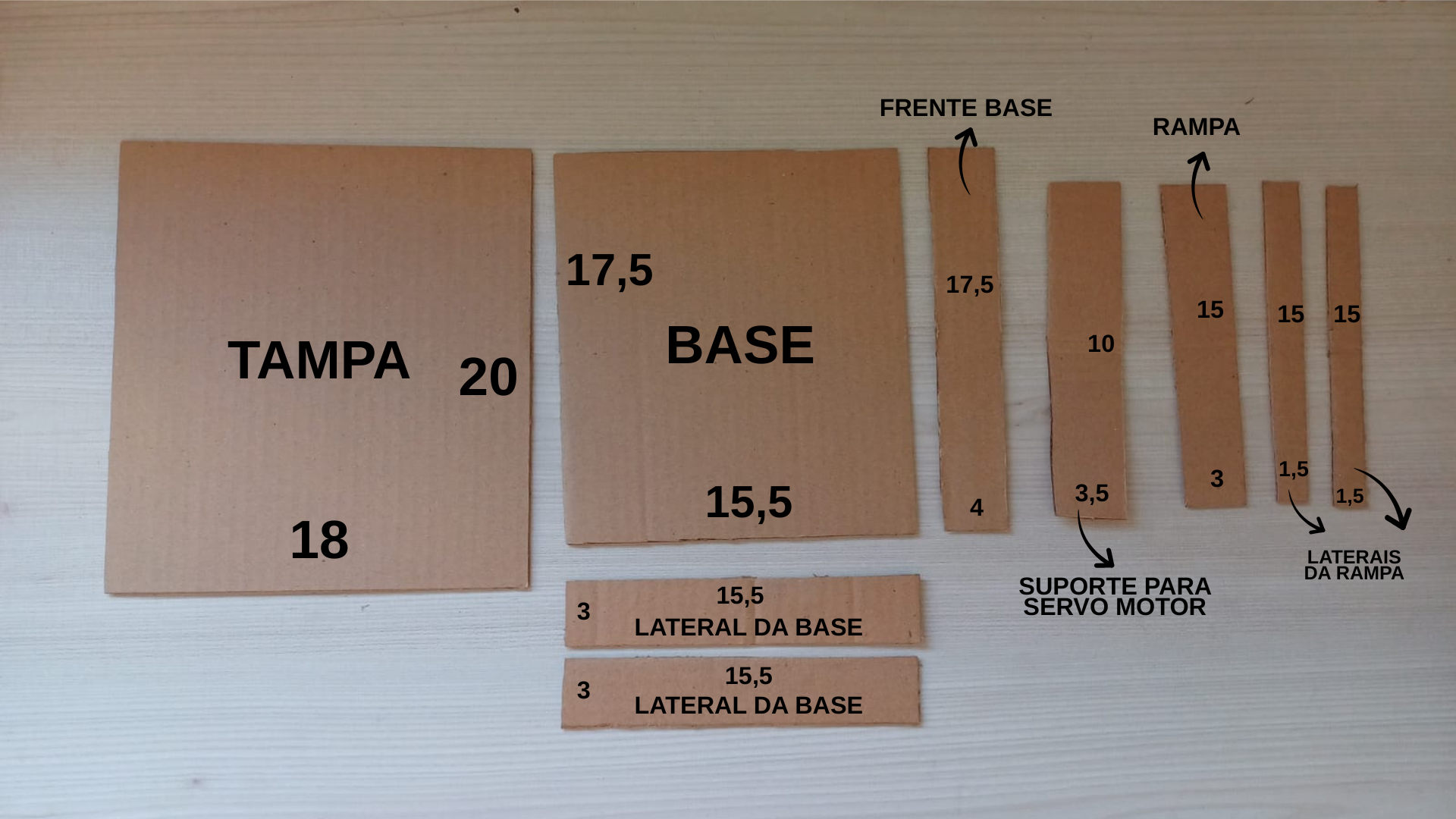
Figura 1 – Peças de papelão cortadas para a estrutura do jogo.
Na imagem estão dispostas as seguintes peças, com suas medidas em centímetros:
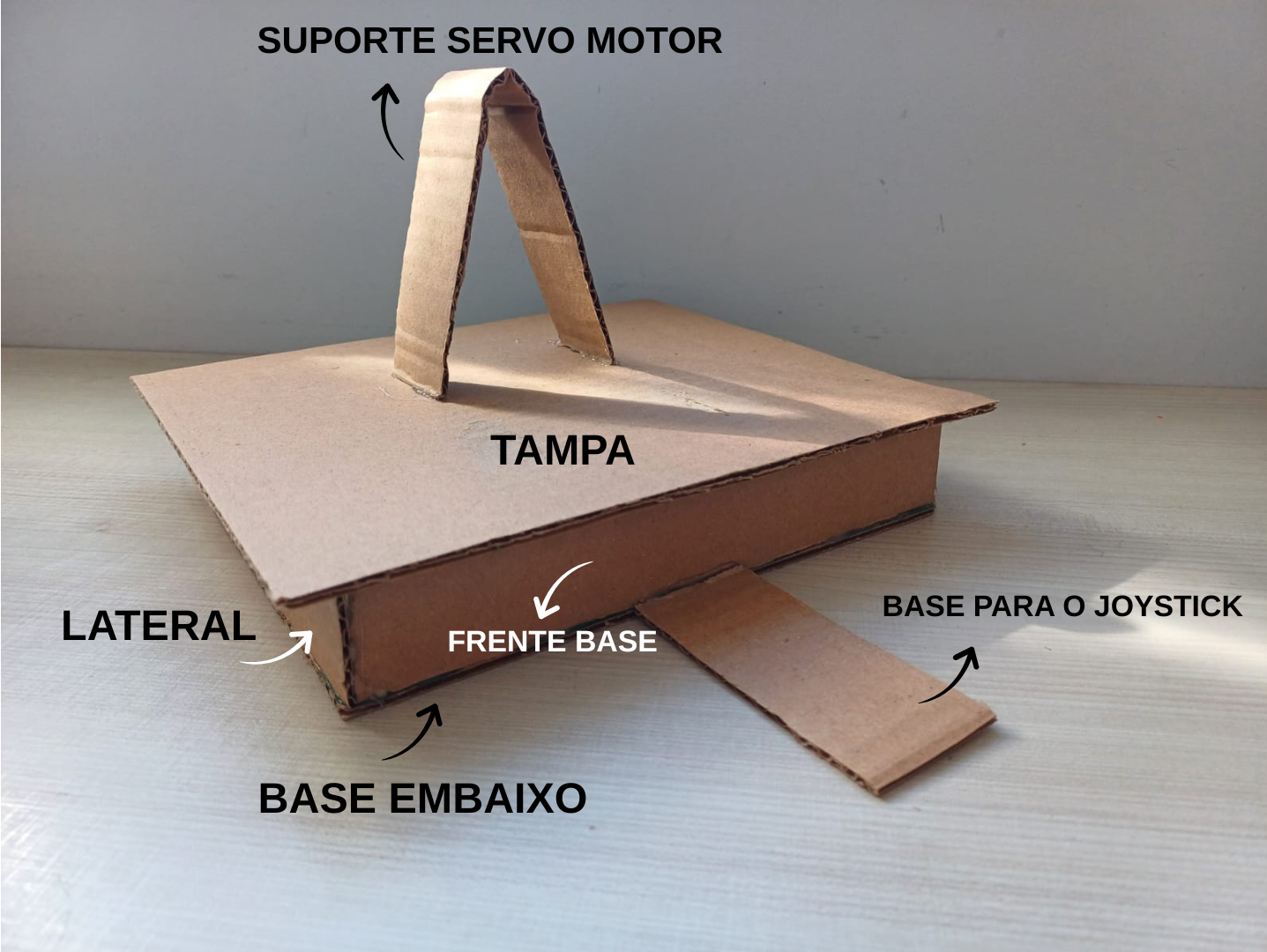
Figura 2 – Estrutura da base montada em papelão.
A imagem mostra a estrutura montada do jogo, formada pela base, pelas laterais e pela tampa superior. Sobre a tampa está fixado o suporte para o servo motor, responsável por movimentar a rampa. Na parte frontal encontra-se a base destinada à fixação do módulo joystick. Esta montagem cria uma caixa que abriga a parte eletrônica e sustenta a plataforma inclinável.

Figura 3 – Detalhe do encaixe da rampa no braço do servo motor.
A figura apresenta a rampa confeccionada em papelão, já montada com suas laterais, e o detalhe do encaixe do braço do servo motor, representado pela cruzeta plástica fixada na parte inferior da rampa. Esse encaixe permite ao servo motor controlar a inclinação da plataforma, possibilitando o movimento necessário para equilibrar a esfera sobre a superfície do jogo.
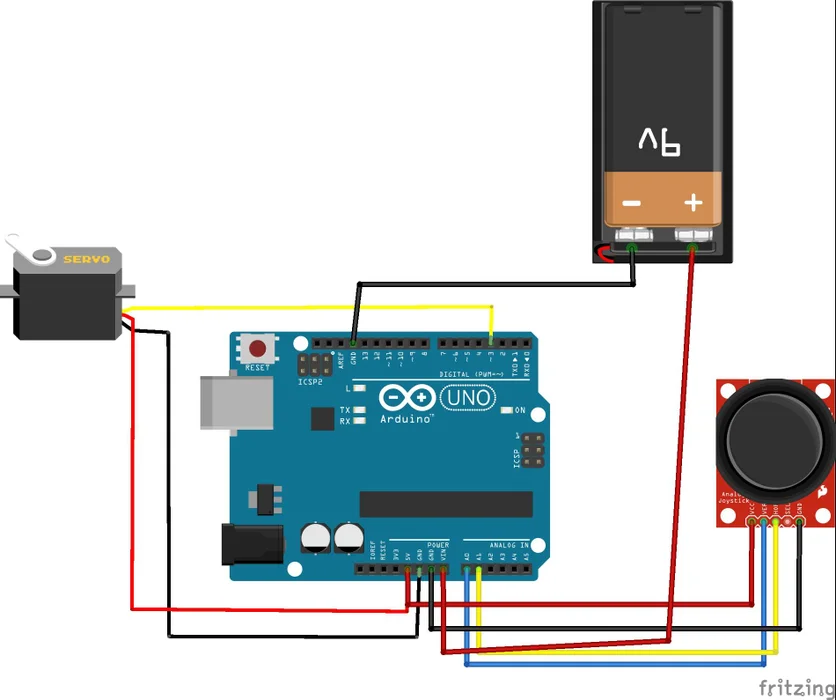
A figura acima mostra a montagem completa do circuito do Arduino Ball Balancing Game, utilizando a placa Arduino Uno, um servo motor, um módulo joystick analógico e uma fonte de alimentação externa. Essa configuração permite controlar a inclinação de uma plataforma para equilibrar uma esfera, conforme o movimento do joystick.
Na imagem, o módulo joystick está posicionado à direita do Arduino Uno. Suas conexões são as seguintes:
O joystick permite captar movimentos manuais nos eixos X e Y, enviando sinais analógicos ao Arduino para determinar a inclinação desejada da plataforma.
O servo motor, localizado à esquerda da placa Arduino, possui três fios:
O servo motor é responsável por movimentar a plataforma que sustenta a esfera, ajustando sua posição conforme os comandos enviados pelo joystick.
O joystick envia ao Arduino valores analógicos que representam a direção desejada. O Arduino processa esses valores e gera sinais PWM para controlar o servo motor, inclinando a plataforma para equilibrar a esfera, reproduzindo a mecânica do Ball Balancing Game.
Após montar o circuito, é hora de programar o sistema que permitirá ao joystick controlar o movimento do servo motor. O código está dividido em partes, assim como no exemplo do PDF do jogo Genius, para facilitar o entendimento.
Abaixo está o código completo e, em seguida, as explicações detalhadas de cada bloco:
#include <Servo.h>
Servo myServo;
int joyX = A0;
int joyVal;
void setup() {
myServo.attach(9);
Serial.begin(9600);
}
void loop() {
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180);
myServo.write(joyVal);
Serial.println(joyVal);
delay(15);
}
#include <Servo.h>Servo myServo;
int joyX = A0;
int joyVal;void setup() {
myServo.attach(9);
Serial.begin(9600);
}void loop() {
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180);
myServo.write(joyVal);
Serial.println(joyVal);
delay(15);
}joyVal = analogRead(joyX);joyVal = map(joyVal, 0, 1023, 0, 180);myServo.write(joyVal);Serial.println(joyVal);delay(15);A construção do Jogo de Equilíbrio com Arduino demonstrou que é possível unir eletrônica, programação e mecânica para criar um brinquedo científico interativo e educativo. Mesmo utilizando apenas um servomotor, foi possível desenvolver um sistema capaz de inclinar a plataforma em um eixo, permitindo ao jogador movimentar uma esfera metálica sobre sua superfície. O projeto mostrou, na prática, como sinais analógicos podem ser convertidos em movimentos precisos, através do controle do servo motor pelo Arduino. Além de proporcionar aprendizado técnico, esta atividade estimula a criatividade, o raciocínio lógico e a habilidade manual na confecção da estrutura mecânica. O jogo pode ser ainda aprimorado com novos materiais, maior robustez ou funcionalidades extras, servindo tanto como experimento didático quanto como hobby para quem deseja aprender mais sobre automação e robótica.